This isn’t the first time scientists have looked to the mantis shrimp as an inspiration for robotics. In 2021, we reported on a Harvard researcher who developed a biomechanical model for the mantis shrimp’s mighty appendage and built a tiny robot to mimic that movement. What’s unusual in the mantis shrimp is that there is a one-millisecond delay between when the unlatching and the snapping action occurs.
The Harvard team identified four distinct striking phases and confirmed it’s the geometry of the mechanism that produces the rapid acceleration after the initial unlatching by the sclerites. The short delay may help reduce wear and tear of the latching mechanisms over repeated use.
New types of motion
The operating principle of the Hyperelastic Torque Reversal Mechanism (HeTRM) involves compressing an elastomeric joint until it reaches a critical point, where stored energy is instantaneously released.
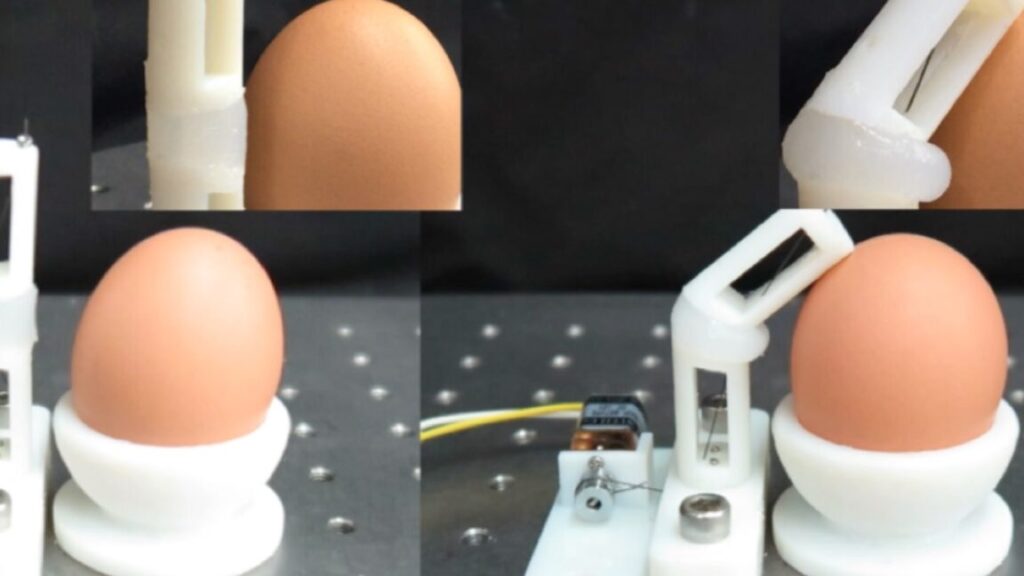
Credit:
Science Robotics, 2025
Co-author Kyu-Jin Cho of Seoul National University became interested in soft robotics as a graduate student, when he participated in the RoboSoft Grand Challenge. Part of his research involved testing the strength of so-called “soft robotic manipulators,” a type often used in assembly lines for welding or painting, for example. He noticed some unintended deformations in the shape under applied force and realized that the underlying mechanism was similar to how the mantis shrimp punches or how fleas manage to jump so high and far relative to their size.
In fact, Cho’s team previously built a flea-inspired catapult mechanism for miniature jumping robots, using the Hyperelastic Torque Reversal Mechanism (HeTRM) his lab developed. Exploiting torque reversal usually involves incorporating complicated mechanical components. However, “I realized that applying [these] principles to soft robotics could enable the creation of new types of motion without complex mechanisms,” Cho said.
Now he’s built on that work to incorporate the HeTRM into a soft robotic arm that relies upon material properties rather than structural design. It’s basically a soft beam with alternating hyperelastic and rigid segments.
“Our robot is made of soft, stretchy materials, kind of like rubber,” said Cho. “Inside, it has a special part that stores energy and releases it all at once—BAM!—to make the robot move super fast. It works a bit like how a bent tree branch snaps back quickly or how a flea jumps really far. This robot can grab things like a hand, crawl across the floor, or even jump high, and it all happens just by pulling on a simple muscle.”

